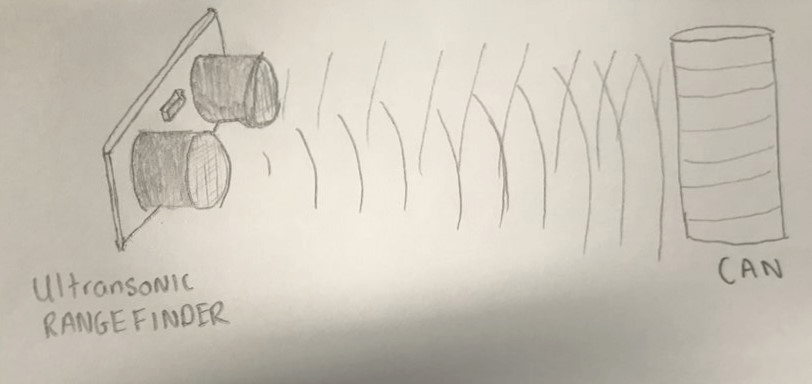
This week we made more progress towards our tip the can challenge. We looked at the programming the HC-SR04 ulstrasonic rangefinder this week. From Ted’s lecture we learned how the rangefinder works. The rangefinder has two main parts an emitter and a detector. The rangefinder emits sound waves out and once it hits and object in reflects them back towards the rangefinder as shown in my sketch below. Along with knowing the basic functions of the rangefinder we also had to know how to create a code so that the rangefinder would only emit sound waves for a certain distance.
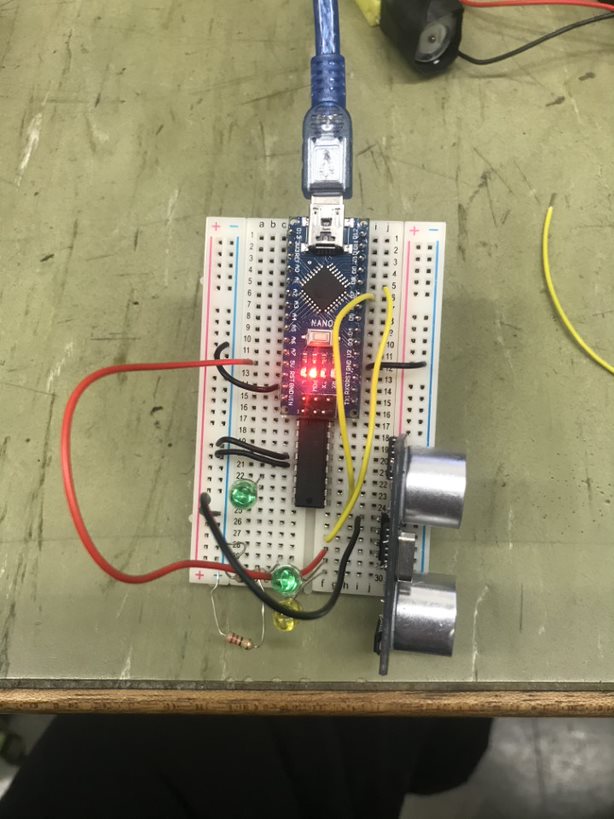
Upon being succesful with the code we inputted a red L.E.D in the circuit to test our code out. Once our rangefinder came into contact a red L.E.D would light up showing that the waves had found an object. We coded the Arduino so that if distance ‘ if distance <50cm , Red L.E.D on’.
As a group we looked online individually at a body for thr bot. we decided that we would look at something with tracks as it has a low centre of gravity and in the battle it would be hard to push off the ring.