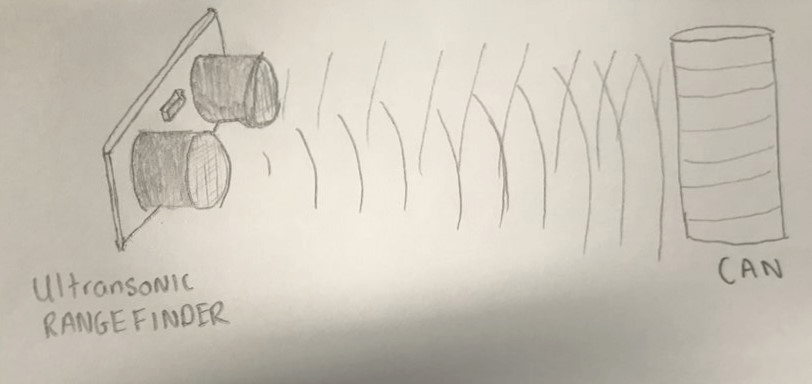
‘When one door closes another door opens‘ this saying definitely applies to the Robo Sumo project in T.U Dublin engineering. After successfully completing the ‘Tip the Can’ challenge all focus was directed towards the competition battle. We discussed our ideas about what features we wanted our robot to had for week 10. We decided that we would have a large bummer/ driver to push off the opposition robot. In the sketch below shows a rough example of what we proposed to do. The switch was to be behind the bumper.
We added an extra 6V battery pack to increase the voltage and power going to the motors.I re built the robot to change the motors back to the faulty one to see if we could resolve the problem and we also tested the voltage in the battery and found out that the first battery pack was only producing 3 volts. We changed the battery’s and tried again with the motor but the motor would only respond for the first couple of seconds from being powered on.
Due to the closer of the college we did not get to complete our project. Our proposed design for the aluminium bumper that I was to create never got constructed and we feel as the project was progressing we were coming together as a team more and working well as an individuals and as a part of a team. Personally at the start of the project I had no knowledge of coding , but I felt I contributed in the construction of the of the robot and the soldering of the wires as this was an area I was familiar with and confident in. Even though i was not the main group member writing the code I felt that I was learning from David and understanding the steps.